


Jak všichni víme, HEGERLS je epochální inovativní logistický robotický produkt, který překonává úzká hrdla systémů pro přístup ke kontejnerům, jako jsou zásobníkové zakladače a vícevrstvé lineární kyvadlové dopravy, pokud jde o autonomní plánování, optimalizaci trasy, efektivita systému, prostorová omezení atd. a zakládá vedoucí pozici společnosti Hebei Walker v oblasti inteligentních řešení přístupu k popelnicím.

Charakteristikou čtyřcestného kyvadlového systému Hagrid HEGERLS je to, že základní vybavení využívá modulární a standardizovaný design, aby se snadno vyrovnalo s obchodní expanzí, využívá heuristický vyhledávací algoritmus hlubokého učení, vytváří zjednodušené plánování trasy, technologii řízení plánování křivek S a 5G. komunikační technologie, zajišťuje efektivitu a bezpečnost provozního zařízení, vysokou nákladovou výkonnost, snižuje investiční náklady zákazníka, optimalizuje využití zdrojů a lze ji aplikovat na různé obratové krabice Kartony a jiné zboží s plochým dnem, určitou nosnou silou a není snadné je deformovat .
Největší rozdíl mezi čtyřcestným člunem typu HEGERLS a tradičním přístupovým zařízením je koncept „vrstvy“. Klíčem k této inovaci je plánovací algoritmus, který nejen dokonale řeší problém efektivity přístupu, ale také flexibilně upravuje provozní cestu a přidělování vozů a řeší problém úzkých míst tradiční vícevrstvé kyvadlové kabiny na výtahu prostřednictvím úkolu. přiřazení, koordinace plánování, řízení silničního provozu a dynamické řízení vozu v přístupovém systému.
Než se objevil čtyřcestný kyvadlový vůz Hagrid HEGERLS, tradiční vícevrstvý kyvadlový vůz zvládl požadavek velkého průtoku. Vyžaduje to auto v každém jízdním pruhu každé vrstvy, aby se zajistilo, že se vozidla nebudou překrývat nebo křížit cestu, ale to bude mít za následek velké množství vybavení a relativně vysoké náklady. Od svého založení se Hebei Walker rozhodl poskytovat čtyřcestný kyvadlový systém s vyšší složitostí a větší obtížností. Následný výzkum a vývoj, výroba a používání přitom drží krok s tempem technologické éry, a aby bylo možné uspokojit potřeby zákazníků různých podniků v různých odvětvích, koncept „více vozidel na stejné patro“ je navrženo v oblasti čtyřsměrného plánování vozidel kyvadlové dopravy, aby bylo splněno flexibilní plánování za předpokladu velkého provozu.

Čtyřcestný kyvadlový vůz HEGERLS ve vícevozovém režimu na stejném podlaží porušuje režim „pevné zóny“ a jeho čtyřsměrný kyvadlový vůz má funkci meziregionálního provozu. Zároveň je také nastaven problém, že počet vozů lze flexibilně konfigurovat, aby bylo možné vozy vzájemně vyměňovat a zajistit tak větší flexibilitu konfigurace vozů. Ve stejné poličce je také povolena funkce režimu vyhýbání se kolizi čtyřcestného vozu v různých scénářích. Jedním z nich je vyhnout se křížení cest vozidel v počátečním plánování a druhým je zabránit kolizi mezi vozidly tváří v tvář neočekávanému křížení v procesu počáteční implementace plánování.

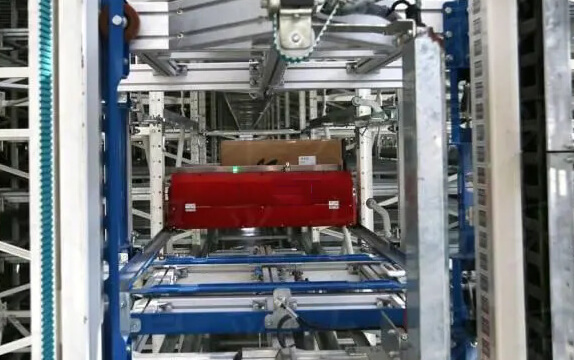
Čtyřcestný raketoplán Hercules HEGERLS může jezdit ve čtyřech směrech, což výrazně zvyšuje flexibilitu použitelnosti staveniště a také plně využívá prostor nepravidelného staveniště. Tento čtyřcestný inteligentní robot raketoplánu může nejen výrazně zlepšit míru využití prostoru, ale má také vyšší adaptabilitu v mnoha rekonstrukcích starých skladů.
Čas odeslání: 16. ledna 2023