



Ve skladu jsou různé typy skladovacích regálů a způsoby skladování a vyskladňování se dělí především do následujících kategorií, včetně ručního skladování a vyskladňování, skladování a vyskladňování vysokozdvižným vozíkem a automatického ukládání a vyskladňování. V dnešní době chce mnoho podniků realizovat automatický skladový provoz, proto chtějí využívat automatizované skladové regály. Například čtyřcestný automobilový regál je druh automatizovaného skladovacího regálu. Jak čtyřcestný raketoplán AGV vstupuje a vystupuje ze skladu? Analyzován závod na výrobu těžkých regálů ve skladu Haigris.

Čtyřcestný kyvadlový sklad
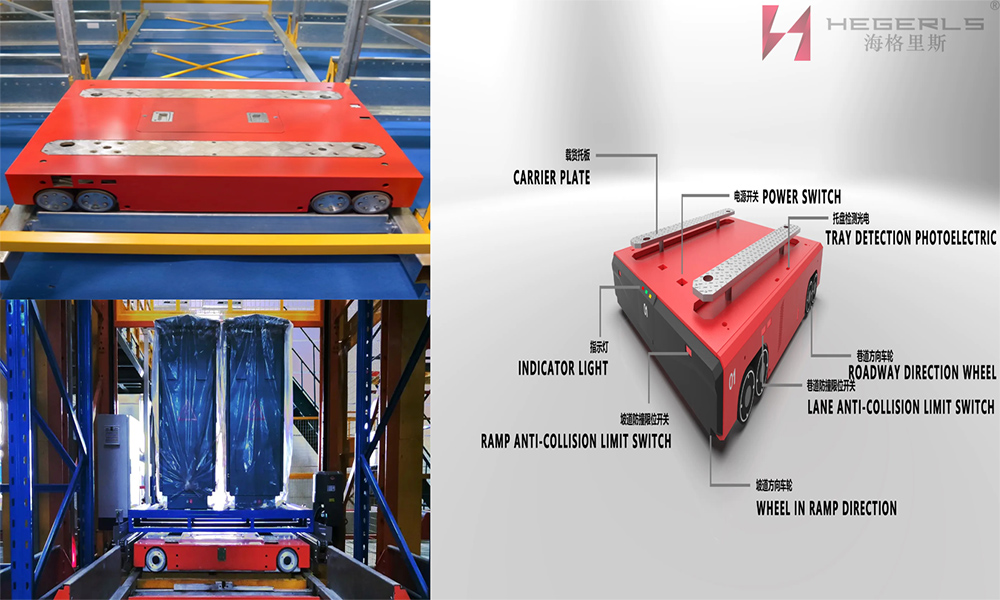
Čtyřcestný kyvadlový vůz je vybaven 12 koly, která se mohou pohybovat ve čtyřech směrech po rovině koleje a volně dosáhnout jakéhokoli nákladového prostoru na rovině skladu. Čtyřcestný člunek je poháněn koly na obou stranách současně, aby se karoserie při provozu nevychylovala, a na trojrozměrné polici může jezdit střídavě po podélných a příčných kolejnicích.

Čtyřsměrný člunek je přitom inteligentní manipulační zařízení, které umí chodit nejen podélně, ale i příčně. Čtyřcestná kyvadlová doprava má vysokou flexibilitu, může libovolně měnit pracovní vozovku a upravovat kapacitu systému zvýšením nebo snížením počtu kyvadlových vozů. V případě potřeby lze na špičkovou hodnotu systému reagovat nastavením režimu plánování týmu pracovních vozidel, řešením úzkého místa operací vjezdu a výjezdu a lze ji také vzájemně nahradit, Když selže raketoplán nebo výtah, jiné raketoplán nebo výtahy mohou být odeslány přes dispečerský systém, aby pokračovaly v dokončení operace bez ovlivnění kapacity systému. Toto zařízení je vhodné jak pro skladování s nízkým průtokem a vysokou hustotou, tak pro skladování s vysokým průtokem a vysokou hustotou. Může dosáhnout vyšší efektivity, nákladů a zdrojů.
Jak čtyřcestný raketoplán AGV vstupuje a vystupuje ze skladu?

1) Způsob skladování
a) Technici inteligentního čtyřcestného raketoplánu nejprve zapnou inteligentní čtyřcestný raketoplán a připraví jej. Inteligentní čtyřcestný raketoplán je v pohotovostním režimu;
b) Po potvrzení místa vychystávání inteligentního čtyřcestného raketoplánu naplánuje WCS trasu jízdy podle aktuální polohy a cílového umístění inteligentního čtyřcestného raketoplánu a poté personál rozdělí zboží do inteligentního čtyřcestného raketoplánu. kyvadlová doprava přes WCS;
c) Inteligentní čtyřcestný raketoplán zahájí plnění úkolu dodání podle přijatého příkazu úkolu;
d) Na přejezdové dráze projíždí inteligentní čtyřsměrný člunek v režimu posunu skutečnou vzdálenost. Během jízdy nepřetržitě snímá stopy, kterými prochází spodní část karoserie vozidla. Každé přejezdové místo, které projede, posuzuje a kalibruje vzdálenost, kterou urazí, skenováním stop. Když je blízko k cíli, jemně doladí parkovací polohu pomocí bočního laserového senzoru, aby bylo dosaženo přesné polohy parkovací polohy;
e) V dílčím kanálu může inteligentní čtyřcestný raketoplán skenovat křížovou dráhu a boční kalibrační zrcadlový reflektor, posuzovat a kontrolovat vzdálenost jízdy skenováním polohy bodu a dosáhnout přesné kontroly polohy v dílčím kanálu, aby dosáhl cíle;
f) Když inteligentní čtyřcestný člun dorazí na zvolené vychystávací místo, paleta spadne, zboží se umístí do regálu a systém WCS je informován o dokončení úkolu dodávky;
g) Inteligentní čtyřcestný raketoplán nadále přijímá pokyny k úkolu nebo se vrací do pohotovostní oblasti.
2) Způsob doručení
a) Technici inteligentního čtyřcestného raketoplánu nejprve zapnou inteligentní čtyřcestný raketoplán a připraví jej. Inteligentní čtyřcestný raketoplán je v pohotovostním režimu;
b) Po potvrzení místa vychystávání inteligentního čtyřcestného raketoplánu naplánuje WCS trasu jízdy podle aktuální polohy a cílového umístění inteligentního čtyřcestného raketoplánu a poté personál odešle úkol vychystávání inteligentnímu čtyřcestnému -cesta přes WCS;
c) Inteligentní čtyřcestný raketoplán začne nabírat zboží podle přijatého úkolového příkazu;
d) Na přejezdové dráze projíždí inteligentní čtyřsměrný člunek v režimu přemístění skutečnou vzdálenost. Během jízdy nepřetržitě snímá stopy, kterými prochází spodní část karoserie vozidla. Každé přejezdové místo, které projede, posuzuje a kontroluje vzdálenost, kterou urazí, skenováním stop. Když se blížíte k cíli, jemně dolaďuje parkovací polohu prostřednictvím bočního laserového senzoru, aby bylo dosaženo přesné kontroly polohy a parkování;
e) V dílčím kanálu inteligentní čtyřcestný kyvadlový vůz skenuje příčnou dráhu a boční kalibrační zrcadlový reflektor, posuzuje a kalibruje jízdní vzdálenost skenováním těchto bodů a realizuje kontrolu přesného umístění v dílčím kanálu, aby dosáhl cíle. .
Čas odeslání: 19. září 2022